This extract from the full article covers the general history and technical details of Ernst Alexanderson's development of alternator-transmitters, starting in 1906.
General Electric Review, October, 1920, pages 794-797:
Transoceanic Radio Communication
By E. F. W. ALEXANDERSON
CHIEF ENGINEER, RADIO CORPORATION OF AMERICA
A certain spirit of romance has been directed in turn toward the initial feats of spanning the oceans by the sailing vessel, steamship, cable, radio, submarine, airplane, and airship. The passing of the romance attached to the earlier of these means has revealed us in possession of another thoroughly practical and established transoceanic type of communication. In the line of succession, radio now stands in midst of its transition stage. Skillful developmental work is hastening the process. The following article briefly reviews the highly successful Alexanderson system of telegraphic and telephonic radio. Each component piece of apparatus is described, its function outlined, and the operation of the whole equipment explained.--EDITOR.
During the last few years a system of transoceanic radio communication which has been developed by the General Electric Company under the direction of the author has come into use in the United States. This system has been adopted by the Radio Corporation of America which recently absorbed the interests of the American Marconi Company. The system has been adopted for future installations by the British Marconi Company. The object of this article is to describe the principal features of the system.
Historical
The continuous wave system of radio communication which is now exclusively used over long distances was foreshadowed by the early work of Tesla and Fessenden. In order to find means for putting his ideas in practice, Fessenden turned to the General Electric Company with the request for development of an alternator with frequencies from 50,000 to 100,000 cycles, which to that time had been considered impractical. The result of this was the development of a 2-kw., 100,000-cycle alternator.* A number of these 100,000-cycle alternators were built and one of these found its way to the laboratory of Mr. Marconi who took personal interest in this development. In 1915, Mr. Marconi made a visit to Schenectady in order to witness the tests of a 50-kw., 50,000-cycle alternator, and on his invitation this alternator was installed experimentally in the transoceanic radio station of the American Marconi Company in New Brunswick, N. J., which was not then in use. This provided the opportunity not only to test the alternator and other features which have been developed in connection with it, such as the magnetic amplifier and speed regulator, but gave the author the opportunity to demonstrate on a large scale his theory for radiation and improvements of antenna design.
The experimental demonstrations of telegraphy and telephony which were made during 1917 with this installation attracted the attention of the United States Government and scientific commissions that were sent to the United States on account of the war. A circumstance which particularly brought the new system into prominence during the war was the partial failure of the cable system and the urgent demands for transoceanic radio communication that developed in connection with American military operations in France. The 50-kw. alternator set in New Brunswick, though installed in an experimental way, was commandeered for official transoceanic service by the United States Navy in January, 1918, and was operated until it was replaced by the 200-kw. alternator set which is now in use in that station.
Radio Transmitting System
Several types of radio transmitting systems are at present in use with a high degree of success. The descriptive matter in this article will, however, be confined to the system for which the author is responsible, as represented by the Naval Radio Station at New Brunswick, N. J.
Generally speaking, any radio transmitting system consists of three essential elements:
- The generator of radio frequency energy.
- The modulating system whereby the energy is controlled so as to produce the dots and dashes of the telegraph code or the modulations of the human voice.
- The antenna or radiating system.
Generating System
There are four types of generating systems of radio frequency energy in use at the present time.
- The spark or impulse generator.
- The Poulsen arc generator.
- The radio frequency alternator.
- The vacuum tube oscillator.
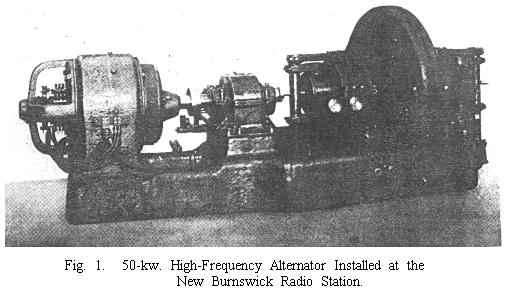
 The system which will be described is of the type employing a radio frequency alternator. The installation in New Brunswick contains a 50-kilowatt alternator shown in Fig. 1, which was operated for some time for experimental purposes with radio telephone at a wave length of 8000 meters, and later in transatlantic telegraph service at 9300 meters.
The system which will be described is of the type employing a radio frequency alternator. The installation in New Brunswick contains a 50-kilowatt alternator shown in Fig. 1, which was operated for some time for experimental purposes with radio telephone at a wave length of 8000 meters, and later in transatlantic telegraph service at 9300 meters.
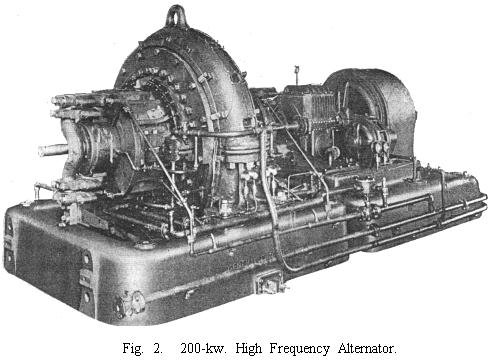
A larger equipment, which has been in continuous service, consists of a 200-kilowatt alternator shown in Fig. 2. The poles consist of projections on each face of the disk near the periphery. The slots between these poles are radial with the axis of the disk and are filled with non-magnetic material so as to present a smooth surface and thereby reduce air friction to a minimum. The disk runs between the two laminated armatures which are cooled by water pipes, as shown in the photograph. The armature winding which consists of wire back and forth in straight open slots, is divided in 64 sections, each section generating about 100 volts and carrying 30 amperes. The current generated by these 64 windings is collected in the air-core transformer mounted on the top of the machine.
This transformer has 64 independent primary windings corresponding to the armature windings. The single secondary winding of the transmitter complete output of the alternator. This collecting transformer is thus to be considered as an integral part of the generating unit; and for all purposes of calculation the characteristics of the generating unit, such as electromotive force and current, are given as delivered from this secondary winding. At full output the alternator delivers 100 amperes at an electromotive force of 2000 volts. It can thus be seen that the alternator is designed for a load resistance of 20 ohms. However, the same machine might be adapted for any other load resistance by selecting a different number of turns in the secondary of the collecting transformer. The reason why this particular machine was designed for a high voltage and low current will be given later in the discussion of the new type of antenna with which it is used.
The 200-kw. alternator when operated at the New Brunswick wave length of 13,600 meters runs at a speed of 2170 r.p.m. It is driven by an induction motor through a gear having having a ratio of 2.97:1. When the radio frequency alternator is used as a source of radiation the wave length is determined directly by the rotative speed of the machine. Thus obviously it is important that the rotative speed should be as nearly absolutely constant as it is possible to make it. An important accessory of the alternator set is therefore the speed regulator. The 50-kw. alternator set shown in Fig. 1 is driven by a direct-current motor, whereas the 200-kw. set is driven by an induction motor of the slip-ring type. The 50-kw. set was equipped with a direct-current motor because the problem of speed regulation of that type of motor is somewhat easier. Induction motors were, however, decided upon for the later types because alternating-current power is more easily available in most localities.

Speed Regulator
The speed regulator consists of speed-determining element and a power-controlling element. The speed-determining element is a resonant radio frequency circuit fed by one of the 64 alternator windings which is set aside for that purpose. The oscillating energy of this radio frequency circuit is associated by magnetic couplings with a rectifying circuit in which the radio frequency energy is changed into direct current. This rectified current in turn actuates the controlling magnet of a vibrating regulator of the type that is generally used for voltage regulation in power stations. When the driving motor is a direct-current motor it is easy to see how this vibrating regulator may be made to control the speed by regulating the voltage of the power supply to the motor. In order to accomplish the same object with an induction motor some new features have been introduced.
An ordinary induction motor is operated at constant potential. When the motor runs light it draws from the line a magnetizing current which is almost wattless. Thus it operates at a low power factor. When the motor is fully loaded, it draws power at a high power factor, the motor used having a power factor of 90 per cent.
When the New Brunswick station was adjusted for operation, it was found that a wave length was desired which required the induction motor to work at 19 per cent slip. The rheostat in the secondary of the motor could easily be adjusted so that the motor would deliver the desired power with full load at 19 per cent slip. However, inasmuch as the output of the alternator varies continually with the making of dots and dashes of the telegraph code, the motor is alternately loaded and not loaded, therefore, the tendency would be for the motor to speed up during the intervals. If the potential of the power supply to an induction motor is varied the motor torque varies by the square of the voltage. It is easy to show, by the theory of the induction motor, that if a motor consumes power at 90 per cent power factor at full load and the load is reduced to ¼ by the reduction of voltage to ½, the power factor will remain at 90 per cent. In fact, it will always comsume power at 90 per cent power factor regardless of its load if the voltage supply is adjusted accordingly, and so long as the secondary resistance remains constant and the speed remains constant.
Thus it may be said that the standard method of operating an induction motor is at constant potential and variable power factor. The method of operating the driving motor of the radio set on the other hand may be characterized as variable potential and constant power factor.
The problem which thus presented itself was to find means for varying the applied voltage in accordance with the action of the speed-determining element, and this has been done in the following way:
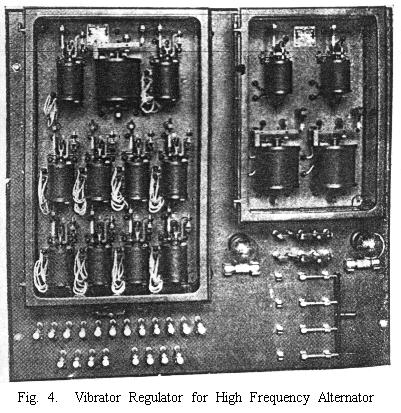
Between the motor and the power supply is introduced a choke coil with an iron core, the permeability of which can be varied by saturation. The change in permeability is produced by a direct current which is controlled by a vibrating regulator. When the motor carries full load the iron core is saturated so that the choking effect is practically zero. At fractional load, the choking effect is automatically adjusted by the regulator so that the motor delivers at all times the power required to hold constant speed. The motor itself operates at all times at its maximum efficiency and power factor, but the power factor of the current drawn from the lines varies with the load. Thus when the motor operates at ¼ load, the power factor of the line is 45 per cent, while the power factor of the motor is 90 per cent. The circuits of the regulator are shown in Fig. 3 and the photograph of the vibrator regulator in Fig. 4.
Modulating System
The method of controlling radio frequency energy involves an apparatus which has become known as the "magnetic amplifier." This device is described in a paper by the author in the Proceedings of the Institute of Radio Engineers, January, 1916, and therefore needs to be referred to only briefly. The magnetic amplifier is a device which is physically of the nature of an oil-cooled transformer. The iron core which is made of fine laminations, is designed in such a way that the magnetic permeability of the iron core can be varied by magnetic saturation. By a special combination of tuned circuits, as shown in Fig. 5, it has become possible to separate the controlling current from the radio frequency current so that a comparatively weak current of a few amperes controls as many hundreds of amperes in the antenna.
When the transmitting station is used for telegraphy, the magnetic amplifier is controlled by the telegraph relays which are part of the wire telegraph system. During the war service the telegraph key was operated in the centralized operating room of the Naval Communication Department in Washington. When the station is used for telephony the controlling current is an amplified telephone current.
While the magnetic amplifier has proven to be a very satisfactory and reliable controlling device for ordinary telegraphy, its particular advantages are most prominent in high speed telegraphic transmission and telephonic transmission on account of its instantaneous magnetic action without any arcing contacts. Fig. 6 shows an oscillogram of radiation at 100 words per minute and a photographic record of reception at the same speed. Fig. 7 shows the telephone modulation of the antenna current when Secretary Daniels was speaking over the telephone line from Washington, controlling the output from the New Brunswick station, thereby transmitting his voice to President Wilson's ship at sea.
---------
* Alexanderson. GENERAL ELECTRIC REVIEW, January, 1913.